使用电子可控前端验证汽车电子雷达 -九游官网下载
全球率先推出的完全电子可控的天线阵列。
全球率先推出的完全电子可控的天线阵列。
您的任务
自主驾驶 (ad) 和高级驾驶员辅助系统 (adas) 是汽车电子行业追求创新发展的主要推动力。雷达传感器是 ad 和 adas 使用的一种关键技术,需要在不同的场景中进行测试,例如行人场景(汽车前方有行人穿行)、城市中行驶场景(朝着停止或速度较慢的汽车驶去)和城际行驶场景(和城市中行驶场景相似,但测试车辆的中心线和目标的中心线不在一条直线上)。
要实现 4 级和 5 级 adas,需要利用硬件在环 (hil) 和实车在环 (vil) 测试场景以及更加复杂的目标模拟功能。对于台式雷达模拟和功能测试的需求也在逐渐增加,以便加快验证过程(图 1)。
目前,原始设备制造商 (oem) 和工程服务提供商在模拟环境中使用软件在环系统来测试传感器和控制模块。软件模拟非常实用,但无法重现实际环境和可能有所不足的传感器响应情形。全自主车辆必须能够处理这些问题。对于原型车或合法上路的车辆,其整体集成系统需要进行路测,以便 oem 验证最终成品后再将其推出上市。路测在开发过程中非常重要,但成本较高、用时较长且难以复制,因此还需要其他测试方法。
在传感器的整个开发价值链中还需要进行其他测试,而且必须集成简单的测试用例,例如测试单个雷达传感器组件和测试具有多个传感器的复杂场景。这是为了在不同的实验室条件下测试自适应巡航控制或紧急制动系统等自主驾驶功能(见图 2)。
在传感器的价值链中进行真实且可重复的雷达传感器测试相当困难:
1) 减少传感器本底噪声,并抑制近距离目标和可能的多径反射。
罗德与施瓦茨九游官网下载的解决方案
现有的目标模拟器使用喇叭天线作为前端,每个模拟器都对准雷达传感器,并通过机械方式移动天线来模拟水平和垂直位置。机械自动化操作减少了整体测试时间。天线的每次移动都会改变回波的到达角 (aoa),如果不重新计算或校准天线,会在创建目标图像时出现错误或降低准确度。
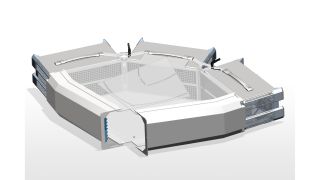
为了突破当前系统的局限性,满足愈加重要的 hil 和 vil 测试的需求,罗德与施瓦茨在全球率先开发出完全电子可控的天线阵列:r&s®qat100 高级天线阵列。r&s®qat100 激活小型贴片天线来模拟方位角和仰角。天线之间的切换时间大约为 2 ms,能够模拟快速移动的方位角目标(例如十字路口的交通穿行场景或超车场景)。
雷达传感器概览

ota 雷达仰角和方位角激励,无需移动天线
无干扰的射频环境:前端无反射
pcb 天线的雷达散射截面积 (rcs) 远小于其他系统中使用的标准增益喇叭天线的 rcs。r&s®qat-b50 屏蔽系统提供屏蔽的射频环境。
可扩展的九游官网下载的解决方案
结合使用多个前端来 360° 全方位模拟雷达环境:
抗振动:非常适合安装在 vil 试验台上
1) 视野。
用例
r&s®qat100 采用模块化设置,可用于各种不同应用来模拟雷达目标。
组件或功能测试
单个雷达传感器的组件测试是一个简单的测试用例。这可以测试雷达传感器能否正确检测到回波和在既定距离或以既定角度区分两个目标,并测试雷达传感器的角分辨率。
场景测试
另一种测试用例包括场景测试,例如涵盖多辆汽车、紧急制动系统或自适应巡航控制的交通场景。这种测试旨在模拟移动目标的方位角、距离、径向速度和大小。根据具体的场景情形,可以模拟一个或多个传感器。


r&s®qat100 功能多样,能够支持雷达传感器价值链中的整个测试过程。
这包括早期阶段在传统的台式装置中独立使用 r&s®qat100 来评估雷达传感器的性能,和使用目标模拟器作为后端的雷达传感器模块 hil 和 vil 应用以使传感器符合 oem 规范(图 6)。
r&s®qat-b11 标准前端具有 96 个发射天线和 5 个接收天线,这些天线被分为 4 个独立分段。配置符合 simo 传感器要求。r&s®qat100 可以使用行模式或段模式工作,具体取决于任务需求。段模式将每一行天线分成四段,每段配有单独的射频连接器,最多可以模拟四个来自不同方向的目标。r&s®qat-b11 还可以额外配备一行 tx/rx 天线 (r&s®qat-b2),能够增加 96 个发射天线和 5 个接收天线,最多可以模拟 8 个来自不同方向的目标或模拟整个阵列范围内的两个物体。
rx 和 tx 天线之间的偏移较大,r&s®qat-b11 会在不同角度出现跳接,无法完全满足 mimo 要求。r&s®qat-b21 单行 mimo 前端具有一行接收天线和一行发射天线。每个发射天线均有一个配对的接收天线,满足 mimo 要求。96 个接收天线和 96 个发射天线组成阵列,能够减小相位误差,提高三维空间回波分辨率,轻松验证 mimo 雷达。
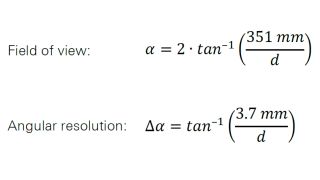
天线相互间隔 3.7 mm (0.146 in),整个仪器的宽度为 351 mm (13.818 in)。装置可以根据传感器进行定制。r&s®qat100 专门针对典型的 adas 雷达发射功率而设计。
r&s®qat100 的视野 (fov) 和可实现的角分辨率取决于装置,并按以下方法进行计算:
自主驾驶 (ad) 和高级驾驶员辅助系统 (adas) 是汽车电子行业追求创新发展的主要推动力。雷达传感器是 ad 和 adas 使用的一种关键技术,需要在不同的场景中进行测试,例如行人场景(汽车前方有行人穿行)、城市中行驶场景(朝着停止或速度较慢的汽车驶去)和城际行驶场景(和城市中行驶场景相似,但测试车辆的中心线和目标的中心线不在一条直线上)。
要实现 4 级和 5 级 adas,需要利用硬件在环 (hil) 和实车在环 (vil) 测试场景以及更加复杂的目标模拟功能。对于台式雷达模拟和功能测试的需求也在逐渐增加,以便加快验证过程(图 1)。


图 1:adas 等级和自动化程度:可能的车辆配置
不同距离和频率范围的衰减值如下所示:

为了尽可能降低外部干扰的影响,附加的屏蔽系统提供近乎无干扰的射频环境,非常适合 r&s®qat100。屏蔽系统可在实验室的工作台或车辆试验台上使用。屏蔽系统为被测雷达提供无多径效应和反射的环境。与 r&s®qat100 结合使用时,表面覆有吸波材料的小型贴片天线提供无干扰的射频前端,并抑制近距离目标和可能的多径反射(见图 10)。
图 10:屏蔽和安装装置
屏蔽系统连接 r&s®qat100,并屏蔽外部信号对雷达的干扰。屏蔽系统具有不同尺寸,具体取决于所连接的 r&s®qat100 高级天线阵列的数量(例如 r&s®qat-z50 屏蔽系统和 r&s®qat-z53 三重屏蔽系统)。


目前,原始设备制造商 (oem) 和工程服务提供商在模拟环境中使用软件在环系统来测试传感器和控制模块。软件模拟非常实用,但无法重现实际环境和可能有所不足的传感器响应情形。全自主车辆必须能够处理这些问题。对于原型车或合法上路的车辆,其整体集成系统需要进行路测,以便 oem 验证最终成品后再将其推出上市。路测在开发过程中非常重要,但成本较高、用时较长且难以复制,因此还需要其他测试方法。
在传感器的整个开发价值链中还需要进行其他测试,而且必须集成简单的测试用例,例如测试单个雷达传感器组件和测试具有多个传感器的复杂场景。这是为了在不同的实验室条件下测试自适应巡航控制或紧急制动系统等自主驾驶功能(见图 2)。
图 2:adas 传感器开发过程
雷达回波发生器的连接数量和类型视测试装置的复杂程度而定。装置的复杂程度取决于模拟的雷达物体、r&s®qat100 高级天线阵列或接收天线的数量(接收天线始终接收信号,但只有在连接到后端时才能转发信号)。
根据单独受控的天线分段的数量,雷达回波发生器必须提供相应数量的输入端口:


如要同步参考频率,将频率参考(输入或输出)连接到雷达回波发生器。
配备提供第二行共 96 个发射天线的 r&s®qat-b2 后,r&s®qat100 具有两行发射天线且每行被分为四个独立分段,单机即可连接八个单独受控的中频通路。这非常适合与装备齐全的 r&s®areg800a 汽车电子雷达回波发生器结合使用,因为后者能够模拟八个完全独立的人造目标。八个中频通路可在一个 r&s®qat100 分段中灵活受控。
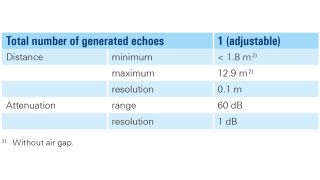
为了模拟近距离目标,r&s®qat100 可以配备模拟步进延迟线 (asdl) 来缩短最小延迟线。此延迟线能够模拟 1.8 m 至 12.9 m 范围内的近距离雷达目标,这对于雷达回波发生器而言非常困难。这样还可以单独使用 r&s®qat100。为了测试雷达传感器的角分辨率,雷达传感器在既定距离或以既定角度区分两个目标。
与目标模拟器相结合时,r&s®areg800a 能够模拟移动目标。
在传感器的价值链中进行真实且可重复的雷达传感器测试相当困难:
1) 减少传感器本底噪声,并抑制近距离目标和可能的多径反射。
总结
自主驾驶员辅助系统迫切需要从检测环境中目标的多个雷达传感器获取可靠的高质量数据。汽车电子公司和供应商清楚自主驾驶场景中的传感器测试非常复杂。
r&s®qat100 是一款完全电子可控的天线阵列,能够在 76 ghz 至 81 ghz 的频率范围内激励汽车电子雷达传感器。r&s®qat100 采用模块化的设计概念,支持汽车电子 oem 和九游官网下载的合作伙伴专注于开发和测试 adas 系统。
采用开放式架构的 oem 支持供应商和服务提供商轻松将 r&s®qat100 平台集成到商用 3d 建模、硬件在环系统和现有的测试与模拟环境中。这样能够在整个价值链中更加快速地测试汽车电子雷达,包括简单的功能性组件验证和高度复杂的多目标场景测试。







